User interface#
Main Window#
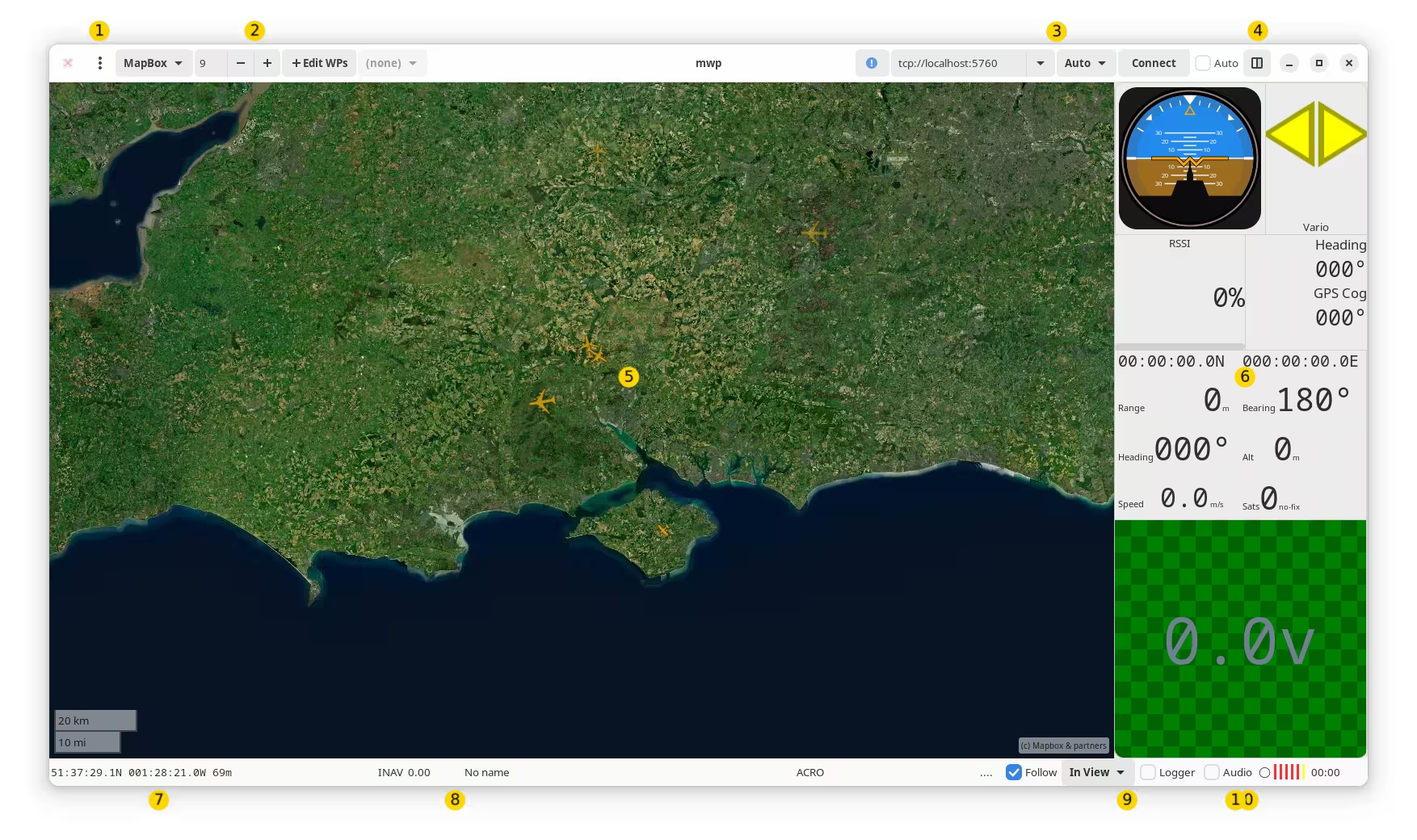
The mwp main window and the main user interface elements are:
- Menu Icon. Invokes the main menu. The menu options are described later.
- Map and Mission settings
- Communications and telemetry settings
- Side Bar Visibility
- Map window
- Side Bar Elements
- Mouse location (user preference units, cursor or map centre location)
- Flight controller information
- Vehicle Visualisation settings
- Sensor status and flight timer
In the sections that follow, there will be a brief summary of each part; more detail will then provided in subsequent sections.
Menu Bar (1)#
The following tables summarise the available menu options. Where usage is not obvious, operation will be described later on.
File Menu#
| Item | Usage |
|---|---|
| Open Mission | Offers a dialog to open a mission file |
| Append Mission file | Appends a mission to the current mission set (creates a multi-mission element) |
| Save Mission | Saves the mission to the current mission file, overwriting any extant content |
| Save Mission As | Saves the mission to a user selected file. For a multi-mission the user can choose not to save specified mission segments. |
| CLI File | Loads CLI artefacts from a CLI File |
| Download Mission from FC | Downs a (multi-) mission from the flight controller |
| Upload Mission to FC > Upload Active Mission | Uploads the current mission segment to the flight controller |
| Upload Mission to FC > Upload All Missions | Uploads all mission segments to the flight controller |
| Restore Mission from EEPROM | Restores the EEPROM stored mission from the flight controller |
| Save Mission to EEPROM | Saves the current mission segment(s) to the flight controller. The current active mission segment (in a multi-mission) is set as the active mission in the FC |
| Interactive Flightlog player | Replays a flightlog2kml supported log format in an interactive player |
| Legacy replayers > Replay blackbox log | Replays a Blackbox log file |
| Legacy replayers > Replay OTX et al | Replays an OpenTX / EdgeTX CSV log file. (Also BulletGCSS and Ardupilot logs where available) |
| Replay mwp log | Replay a mwp (JSON) log file |
| Replay mwp RAW log | Replay a mwp raw (binary) log file |
| Stop Replay | Stops a running replay |
| Static Overlay > Load | Loads a static KML format overlay file |
| Static Overlay > Remove | Removes a loaded KML file from the display |
| Geozones | Invokes the INAV Geozones editor |
| Safe Homes | Invokes the INAV safe-home editor |
| UBlox Assist Now | Invokes the Assist Now dialog (download / store / restore / upload GPS data |
| Quit | Cleanly quits the application, saving the display layout |
Edit Menu#
| Item | Usage |
|---|---|
| Set FollowMe Point | Displays the Follow Me dialogue |
| Preferences | Displays the preferences dialogue |
| All Settings | Runs mwpset providing access to all of mwp's gsettings |
| Survey / Area Planner | Invokes the area-planner to generate search or survey plans as a mission. |
| Mission Manager | Display the multi-mission dialogue to remove segments from a multi-mission |
| CLI serial terminal | Displays the INAV CLI using the current connection |
| Get FC Mission Info | Display the mission status from a connected FC |
| Seed current map | Shows a dialogue to seed the map cache for offline (field) use |
| Reboot FC | Reboots a connected flight controller |
| Audio Test | Reads out the mwp version number as an audio test |
View Menu#
| Item | Usage |
|---|---|
| FPV Mode | Toggls FPV Mode |
| Zoom to Mission | Zooms the map to the currently loaded mission |
| Set location as default | Sets the current location as the default (startup) location |
| Centre on position ... | Shows the "Centre on Position" selector and "favourite places" editor" |
| Measure Distance | Invokes the distance measurement tool |
| GPS Statistics | Displays FC GPS status (rate, packets, errors, timeouts, HDOP/EPV/EPH) |
| Radar View | Displays the Radar (inav radar / ADS-B) view |
| Radar Devices | Configure the Radar (inav radar / ADS-B) devices |
| Telemetry Tracker | Displays the Telemetry Tracker UI |
| Flight Statistics | Display the flight statistic dialogue (also automatic on disarm) |
| Video Stream | Opens the (live) video stream window |
| ADSB altitude legend | Toggles display of the ADSB altitude legend |
| GCS Location | Displays the indicative GCS location icon |
Help Menu#
| Item | Usage |
|---|---|
| Online Manual | Opens this document in the default browser |
| Shortcut keys list | Displays the short cut keys list |
| About | Displays version, author and copyright information |
Map and Mission Settings (2)#
A number of different map products are available. mwp offers the mapping library (libshumate) defaults, MapBox, Esri Clarity, Esri World Imagery. (deprecated Bing Map), and user defined options, for example anonymous maps.
These map products have different maximum zoom levels, (typically between 18-20), and in at least one case, are not globally consistent (Esi World Imagery has imagery tiles at zoom 19 in populated areas but returns a "no data" tile at zoom 19 in less populated areas). mwp cannot 'fix' this.
Note that Bing Maps is deprecated by Microsoft, and MapBox will only be offered if the user has supplied a MapBox API key. The Bing option will be removed some time after the service is ended (though cached data should still work).
The zoom level may be selected from the control here, or by zooming the map with the mouse wheel.
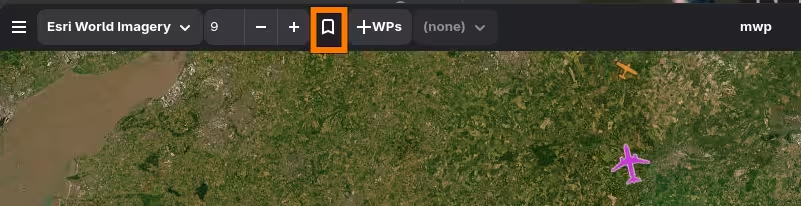
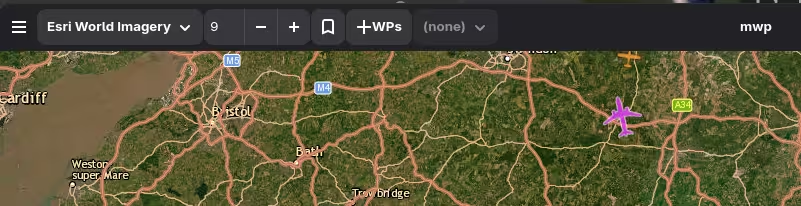
The user may add a "Gazetteer" layer (Places and Transportation) overlay to any other map product, by toggling the "Gazetteer" button:
The +Add WPs (Edit WPs) button enables mission edit mode (click on the map to create a WP, drag to move, right mouse button for properties). Graphical WP editing may be augmented by the table orientated mission table view, which allows additional control (altitude, speed, special functions, for example fly-by-home waypoints).
The "Active Mission" drop down supports INAV 4.0+ multi-mission. There is also a mission manager item under the Edit menu.
Communications and telemetry settings (3)#
There is a (blue "!" in the example) 'navigation safe' status icon. If this icon is shown (i.e. navigation is unsafe, then clicking on the item will provide more information:

The Device drop-down offers detected and pre-set (Preferences) devices for the FC / telemetry port. The device syntax is described the Device and Protocol definition chapter.
The Protocol Selection drop-down (showing Auto in the reference image) allows the user to provide a hint as to communication protocols available on Device. These are further described in the Device and Protocol definition article.
The Connect / Disconnect button connects / disconnects the displayed device.
Side Bar Visibility (4)#
Toggling this button will hide or show the side bar (6).
Map Area (5)#
The map area displays the currently selected map at the desired zoom level. The map may be managed using familiar controls (drag, scroll wheel etc).
Side Bar elements (6)#
The side bar displays a set if user defined UI elements ("dockets") that display flight / sensor information.
See Side Bar Management. In the main window screen shot (left to right, top to bottom) we have:
- Artificial horizon
- Vario Indicator
- RSSI / LQ Indocator
- Direction Status (Heading (Position Estimator/Compass v. GPS). Useful to diagnose mag EMF interference on multi-rotors).
- Flight View. General geo-spatial information.
- Battery status. Current usage is also shown when available.
Location (7)#
The location of the mouse pointer on the map. Position in the user's preferred format and ground elevation are shown.
FC Information (8)#
Displays the firmware, version and build with API information, profile and flight mode.
Vehicle Visualisation (9)#
- Follow : user setting
auto-follow. whether the map always displays the aircraft icon and tracks (requires GPS). - In View / Centre On / Moviong Map : Defined how to scroll the map to keep the aircraft in view.
- In View : The map is only panned when the vehicle would otherwise be off-screen.
- Centre On : The vehicle is always centre of the screen and the map pans as required.
- Moving Map : The vehicle is always centre of the screen, vertically aligned, the map pans and rotates as required.
Sensors and flight status (10)#
- Logger : Generate mwp logs (JSON format).
- Audio : user setting
audio-on-arm. Whether to "speak" status information.
The green / red bars show gyro / acc / baro / mag / gps / sonar sensor status. If a required sensor fails, a map annotation will be displayed, together with an audible alarm (image from legacy version).
